產品資訊
產品資訊






產品特點
Kinarm 的 Exoskeleton Lab 機械臂式 標準系統包括:
- 單側或雙側用於上肢的 Kinarm 機械臂式評估裝置
- Dexterit-E™ 實驗控制軟體和硬體
- 配件可為患有嚴重姿勢障礙(如中風、脊髓損傷、CP 和 ALS)的研究提供身體支持
- 可選用的 Kinarm 標準測驗
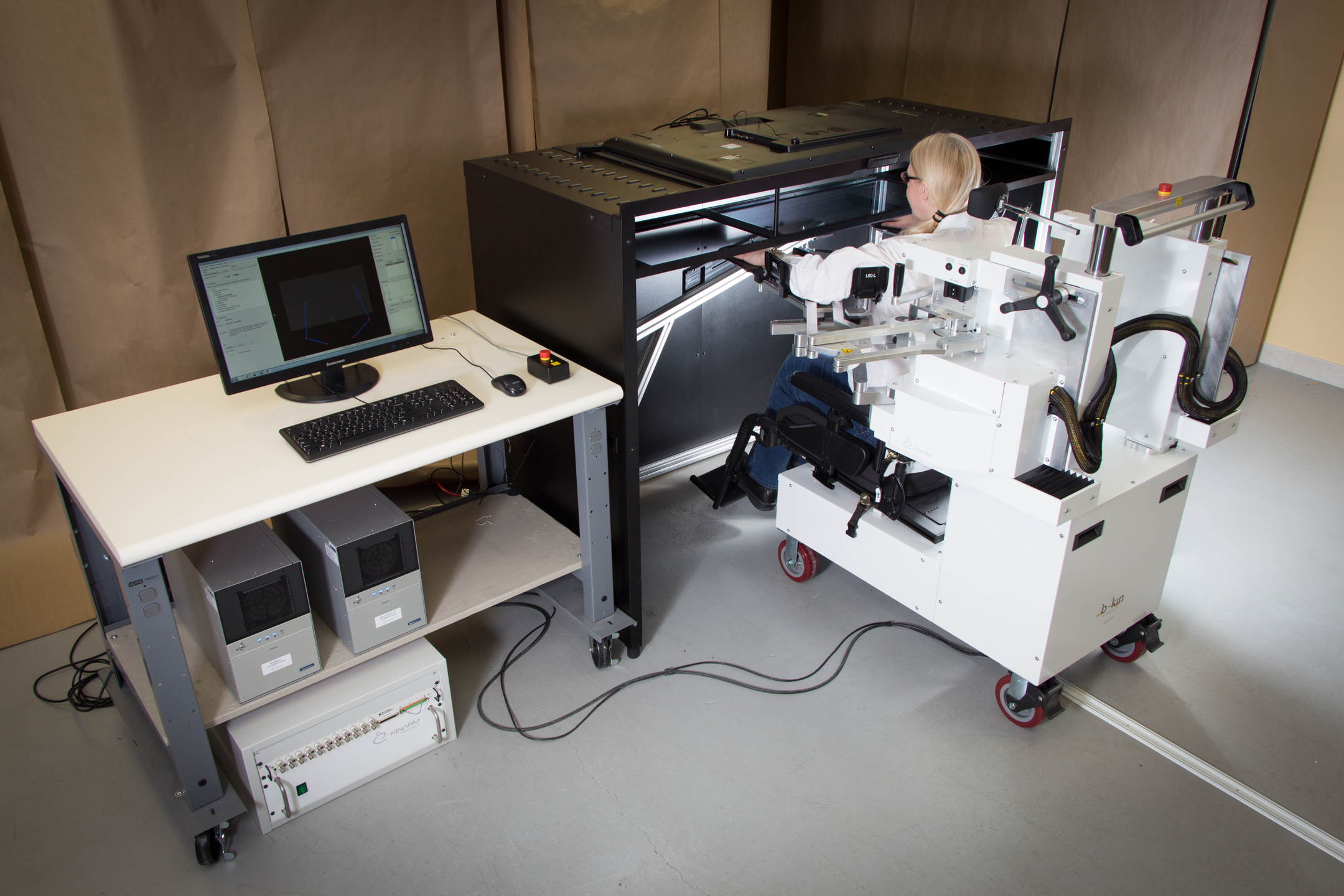
單側或雙側用於上肢的 Kinarm 機械臂式評估裝置
Kinarm Exoskeleton Lab 使用可調節連桿來允許手臂在水平面上進行平面運動,包括肩關節和肘關節的屈伸運動。 該設計提供來自肩部和肘關節的回饋,並獨立地將負荷加到肩部和/或肘關節。 可以從系統計算關節運動和肌肉扭矩的模式。 VR 系統允許控制視覺刺激,甚至是看到肢體的部份。 使用兩個 Kinarm 機械臂可以比較手臂間的性能以及研究雙手協調。
2D 虛擬實境
虛擬實境系統允許控制視覺刺激和肢體視覺。
易於使用的控制、分析軟體
Kinarm Lab 的操作和控制軟體 Dexterit-E™ 讓使用者快速執行他們的研究,無需具備專業程式撰寫知識。
Dexterit-E 是執行 Kinarm Labs 的行為控制和數據搜集軟體。 Dexterit-E 通過 Microsoft Windows® 電腦上易於使用的界面進行操作,但透過即時電腦運算 Kinarm Lab,為研究中的系統提供精確、可靠的控制和測量。 有多個級別的定制和靈活性。 Kinarm 標準測驗可用於即時數據收集、分析和報告。
整合眼動追蹤模組(選購)
一種頭部自由活動的眼動追蹤模組: 簡化實驗設置,確保不會干擾頭部,這在臨床研究中特別重要; 並且很容易收納在空間有限的 Kinarm VR系統中。
產品規格
System Specifications
• Real-time control of experiment at 4 kHz; data acquisition at 1kHz
• Minimum suggested lab size 3.5m x 3.5m (12’x12’)
• Subject sizes: range of body sizes and weights covering the 5th-95th percentile of the general population from 5 years old (with optional child-size arm troughs) and adults up to approximately 198 cm height
• Maximum subject weight for chair: 182 kg
• DAQ options available
• No special voltage requirements
Exoskeleton Robot Specifications
• Maximum continuous joint torque 5.1 Nm
• Maximum intermittent (<5 s duration) joint torque: 15.3 Nm
• Feedback resolution of 0.0006° (deg) (~4 microns)
• Vertical out-of-plane stiffness of 8,500 N/m; end-point in-plane mechanical stiffness of 16,400 N/m
Kinarm Gaze-Tracker Specifications
• Workspace ~ 55° x 40° ellipse
• Resolution ~ 0.05°
• Mean Accuracy (with limited head movement) ~ 0.5°
• Rate 500 Hz
相關型錄/資訊
應用領域
- 臨床研究: 神經學評估、神經修復、機器人技術、運動、伸展、感官、感覺運動、本體感覺、運動感覺、認知障礙、感覺障礙、運動障礙
- 基礎研究:運動控制、運動控制、協調運動控制、運動技能、運動學習、運動適應、視覺運動旋轉、眼球運動、即時回饋控制策略、伸展運動、目標切換、擾動、力場適應、負載、障礙物 , 運動場, 目標導向運動, 本體感覺, 初級運動皮層, 反饋控制, 多關節動力學